13555480275

使用Moku:Pro同时实现窄线宽激光系统的锁定和表征应用案例
利用Moku:Pro 的多仪器并行模式,用户可以使用激光锁频/稳频器将激光锁定到光学腔,无需额外的测试设备或布线又能同时使用频率响应分析仪(FRA)测量 Bode 图。通过向误差信号施加干扰并使用 FRA 测量传递函数,可以检查闭环增益、相位裕度和环路干扰抑制性能。用户可以在频率响应分析仪和激光锁频/稳频器之间快速切换,方便灵活地调整 PID 参数同时并优化环路性能,从而确保稳定性并最大限度地抑制干扰。
在分子和原子物理等高精度测量应用中,具有动态频率噪声抑制的激光系统因其良好的长期稳定性而得到广泛应用。要实现稳定的激光锁定,需要高度优化的反馈控制,这尤其涉及到包括测量: 1) 控制环路的传递函数,确保低频时有足够的增益,同时保持较低的单位增益频率,以维持环路的稳定性;2) 干扰抑制,即通过测量干扰耦合到激光器中并且穿越整个系统后的传递函数评估系统抗干扰性能。
传递函数通常可以绘制成Bode图,表征在设定频率范围内的环路增益和相移。测量闭环系统干扰抑制的主要挑战是在不中断反馈控制的情况下注入噪声。通常,系统设置非常复杂,不仅需要噪声源作为注入干扰,又需要网络分析仪来测量响应。
在这篇应用说明中,我们将演示如何使用 Moku:Pro 的多仪器并行模式来表征激光稳定系统的开环和闭环性能。通过 Moku:Pro,我们可以将激光锁定在腔体上,注入干扰,并同时测量开环、闭环和扰动传递函数。此外,还可以实时调整 PID 参数来优化环路配置,以确保稳定性、增强干扰抑制和抑制频率噪声。Moku:Pro 为激光稳定和特性分析提供了紧凑高效的解决方案。
为了更好地理解激光锁定系统,我们首先需要简要回顾一下通用反馈控制原理。通过分析和推导本节中的干扰抑制方程,我们可以确定在何处注入干扰以及在 Pound-Drever-Hall (PDH) 锁定过程中探测环路响应的位置。
一般来说,我们可以将控制系统分为两种类型,即开环控制系统和闭环控制系统。主要区别在于前者的控制方式与系统的输出无关,而后者的控制方式依赖于输出[1]。通用反馈控制环路的基本概念是利用当前工作点与参考点之间的差值作为误差信号,将系统的输出维持在一个恒定的设定点上运行[1]。用于激光稳定的 PDH 锁定技术利用腔反射产生误差信号,并反馈给激光器以保持光源在特定频率下发射激光,同时将激光频率噪声降至zui 低。这被视为闭环控制 [2]。基本的反馈控制系统通常由三个部分组成,如图 1 所示,即被控对象(需要控制的对象)、传感器(测量被控对象的输出)和控制器(产生反馈输入)。

图 1:典型反馈控制系统框图。它由三个主要部分组成:被控对象 (P)、测量特定信号的传感器 (S) 以及为被控对象生成输入的执行器或控制器 (C)。
我们可以利用拉普拉斯变换推导出控制系统的传递函数,对于给定的时域信号 f(t),其定义为 F(s)。

对于图 1 所示的系统,三个组件都有自己的传递函数,分别用P(s)、S(s) 和 C(s)表示为被控对象、传感器和控制器。 为了简化下面的推导,引入了一个额外的内部信号并标记为U(s)。 输入信号为 X(s),我们可以计算出经过这样的系统后的输出信号:

根据公式 (2) 和 (3),反馈系统(H(s))的传递函数可以通过输出拉普拉斯变换与输入的比值求得:

其中 C(s)P(s)S(s) 是系统的开环增益(有时也称为返回比),方程 (4) 称为闭环增益。 到目前为止的分析主要集中在信号的变换上,而在实际情况中,噪声的抑制更令人感兴趣。 噪声可以从环路内的任何地方引入,但这里我们考虑从被控对象引入的噪声(其他噪声源也可以通过相同的步骤分析)。 当引入噪声 (N(s))进行分析, 系统输出被修正为:

对于具有较大控制增益 (C(s) -> ∞)的系统, 系统的输出接近输入, 也称为单位增益。由外部干扰引入被控对象的噪音也被大幅抑制至零点。这类干扰的传递函数也被称为干扰抑制(或灵敏度函数), 这表征了一个控制系统应对被控对象输出出现干扰的灵敏度。和开环传递函数相似, 干扰抑制也与频率相关。当干扰抑制的幅度超过单位增益, 这类噪声抑制变得无效, 相应的频率因此被称为单位增益频率。更重要的是, 当开环增益的相位达到180度 (这是 1 + C(s)P(s)S(s) = 0 时的闭环极点), 噪声将被放大, 导致系统不稳定, 尤其是当 C(s)P(s)S(s) 接近 -1 时。这个转换点是反馈系统的另一个关键参数, 称为相位裕度。闭环控制的带宽受单位增益频率和相位裕度的限制, 如果相位裕度出现在低于单位增益频率的频率上, 系统将无法稳定。
下面的激光稳频系统相当于上一章节讨论的反馈控制回路。在这篇应用笔记中, 激光通过使用PDH锁频方法的反馈控制回路被锁定到一个光学腔上。图 2 说明了激光稳频过程的反馈回路, 由外部伺服控制与内部 PZT 触动器相结合形成。
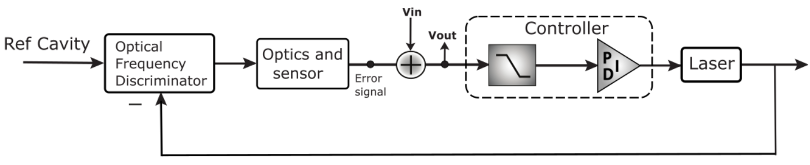
图 2:概念框图显示将激光波长锁定在腔谐振上的反馈控制回路。PID 控制器控制激光器内部的 PZT 传感器。
这里稳频系统可以理解为激光器是被控对象,其频率是系统输出(Y(s))。系统试图稳定的设定点是光学参考腔的谐振频率。输出在光学鉴频器上与设定点做比较。一个传感器测量这些信号的差值(S(s)), 其中包括光信号和光电信号, 生成的误差信号被控制器进一步处理。一般控制器也被称为伺服控制(C(s))。它针对被控对象的特性,提供控制信号以减少位置误差并优化驱动过程中的过冲。这里使用的激光器(Plant 被控对象)一般都是可调谐激光器, 它的频率能够根据控制信号通过内置的 PZT 触动器来调制。所以, 控制信号被输入至激光器后生成最终的输出波长。最后这个输出信号被反馈回去并刷新反馈信号。
基于触动器的响应, 需要仔细设定控制器的响应和 PID 设置来保证稳定的反馈和足够的噪声抑制。为了更好地理解, 可以通过测量干扰抑制来表征整个系统的闭环控制响应。我们可以通过在 Vin 处注入扫频信号和在 Vout 处得到输出信号。推导出的相对应频率响应为:

其中 C(s)、P(s) 和 S(s) 表示控制器(伺服控制)、被控对象(PZT 触动器)和传感器的作用。公式6中的表达式提供干扰抑制, 公式7表示互补灵敏度函数, 公式8是控制系统的开环增益。
实验设置
在这个实验里, Moku:Pro不仅用作锁相放大器, 也表征了系统的闭环控制响应。图3显示了完整的系统搭建, 图4演示了多仪器并行模式下的仪器配置。为了达到我们的目的, 我们在7491个独立的插槽上部署了7491个仪器功能: 分别是激光锁频/稳频、锁相放大器、PID控制器和频率响应分析仪。

图 3:鉴定激光稳定系统回路干扰抑制的实验装置。使用频率响应分析仪直接测量和生成干扰抑制,同时使用Moku:Pro 的激光锁频/稳频器将激光锁定到外部参考腔。通过将PID 控制器比例增益设置为 0 dB 实现的注入Injection或加法器Adder。

图 4:多仪器并行模式下的 Moku:Pro 配置。请注意,由于四个插槽wan 全相互独立,因此添加到插槽中的仪器功能顺序并不重要。
干扰在误差信号解调之后但在传输到控制器之前被注入。所以我们将激光锁频过程分成两个单独的过程: 锁相放大器 (LIA) 通过 Out1 生成调制信号给电光调制器 (EOM), 同时来解调误差信号; 激光锁频/稳频 (LLB) 跳过解调过程并只提供伺服控制或者控制信号传输回激光器。Out2, 来自于 LLB 里的快速PID控制器, 随后被直接连接到激光器的压电陶瓷来精确地调控激光器的频率, Out3 被接到激光器的温度控制。
同时我们用频响分析仪 (FRA) 来测量闭环系统的干扰抑制, 这里它生成一个正弦扫频偏移信号并使用PID控制器作为加法器来注入 PID 控制环路信号 (In 1)。为了实现这个求和效果, 我们通过设置一个输入矩阵如

作为加法器来配置 PID 控制器并且比例增益设置为0dB。加法器的输出被分成两路, 一路提供误差信号给激光锁频/稳频, 另一路被接到 FRA的通道 B来测量闭环控制的频率响应。FRA的通道 A则在注入正弦波之前记录 PID 控制环路的频率噪声。
激光锁频/稳频器提供伺服控制。通过三角波扫描来监测PDH误差信号, 然后我们调节慢速 PID 偏置来让光学参考腔的谐振频率接近扫描范围的中点。然后在系统稳频前打开积分器饱和来避免过度补偿。我们再选择载波的过零点作为锁频点并使用“Lock Assist"功能来进行锁频, 从而启动快速 PID 控制。最后, 我们禁用积分器饱和来以启用全部的积分效应以在低频段获得更多增益。您可以在此处找到激光锁频/稳频的详细说明。
在我们成功锁定激光器频率到光学腔上后, 我们切换仪器到频率响应分析仪, 在那里我们在两通道上用一个足够小的输出信号(5 mVpp)配置成(In ÷ Out)的测量方式。通过在感兴趣的频率范围上进行扫频源的扫频, 我们生成了与公式 6-8 相关的传递函数。
实验结果
观察图5 的测量结果。

图 5:测量的传递函数,显示整体闭环响应(红色)、闭环干扰抑制(蓝色)和计算出的激光锁定系统的开环增益(橙色)。干扰抑制的单增益频率约为 24 kHz。
红色轨迹曲线显示测得的互补灵敏度传递函数(公式7), 蓝色轨迹曲线显示了干扰抑制(公式6)。通过使用数学计算通道(ChA ÷ ChB ),我们能够动态地计算开环控制的传递函数,如图5里的橘色轨迹曲线。从蓝色轨迹曲线(或者橘色轨迹曲线)我们能够看到稳频控制环路拥有高达 ~24kHz的单位增益频率,同时相位裕度略大于90度。该系统的稳频控制带宽限制来自 PZT 的机械谐振频率。我们能够从这个图观察到有一个 ~63kHz的机械谐振频率。所以,进一步调节系统到一个更高的增益可能会激发共振,这会导致在这个特殊频率点上的正反馈并破坏系统的稳定性。
另外,我们能够从开环控制响应(橘色轨迹曲线)观察到低频增益达到了60dB。这与蓝色轨迹迹曲线中的 -60 dB 扰动抑制相对应,同时表明激光锁频/稳频仪器能够提供足够的伺服控制增益来充分抑制激光频率噪声并维持稳定的锁定。
结论
Moku:Pro基于现场可编程门阵列 (FPGA) 的灵活方法解决了传统固定功能测试和测量硬件的许多缺点。基于FPGA 的架构提供了可以在仪器间动态切换的能力。它还提供了同时使用多个仪器功能的能力, 例如用 频率响应分析仪表征激光锁频控制环路的传递函数时用 激光锁频/稳频其维持一个稳定的锁频过程。多仪器并行模式使优化闭环控制配置的过程更加直接和高效。直观的用户界面极大地降低了实验搭建的复杂性, 提供了更易于访问和灵活的解决方案。
此外,虽然本应用笔记显示了一个利用 PDH 锁频方案的示例, 但这种验证控制环路响应的方法适用于其他锁频技术, 例如 DC 锁频、边缘侧锁频(fringe-side locking)和倾斜锁定(tilt locking), 这些技术在激光稳频领域具有广泛的实际应用。
关于昊量光电:
上海昊量光电设备有限公司是光电产品专 业代理商,产品包括各类激光器、光电调制器、光学测量设备、光学元件等,涉及应用涵盖了材料加工、光通讯、生物医疗、科学研究、国 防、量 子光学、生物显微、物联传感、激光制造等;可为客户提 供完 整的设备安装,培训,硬件开发,软件开发,系统集成等服务。
 上海市徐汇区虹梅路2007号6号楼68楼
上海市徐汇区虹梅路2007号6号楼68楼 [email protected]
[email protected]
昊量微信在线客服
昊量微信在线客服
版权所有 © 2024上海昊量光电设备有限公司 备案号:津ICP备55480275号 技术支持: Sitemap.xml
