


| 品牌 | 其他品牌 |
|---|
高精度微型振镜/压电扫描镜
AU-M3-RS微型振镜将微型压电马达、精密导向系统、位移传感器、微处理器集成到紧凑的空间中,该模块拥有超小的体积(直径<12mm),在紧凑的空间中包含一个世界上zui小的压电马达和IC驱动,但却可以提供更高的功率和可靠性,精度比电磁电机高十倍。内置微处理器及PID控制器,无需外加控制器,只需要通过标准的I2C 或者SPI接口输入简单的串行命令就可以驱动旋转台。内置位移传感器,使微型振镜的角分辨率达到0.025°。采用*的自锁设计,只有在移动时才使用动力,使其拥有极低的功耗。
压电陶瓷电机微型振镜、压电陶瓷电机驱动微型振镜、微机械微型振镜,微型振镜,MENS扫描镜,微型扫描镜
高精度微型振镜/压电扫描镜
不需要外部控制器。该模块将PID控制器集成到电路板上,只需要通过标准的I2C 或者SPI接口输入简单的串行命令就可以驱动该控制器。可以通过USB适配器连接电脑,直接通过软件控制聚焦模块的运动。操作简单使用方便。

AU-M3-RS拥有以下几种开发套件:
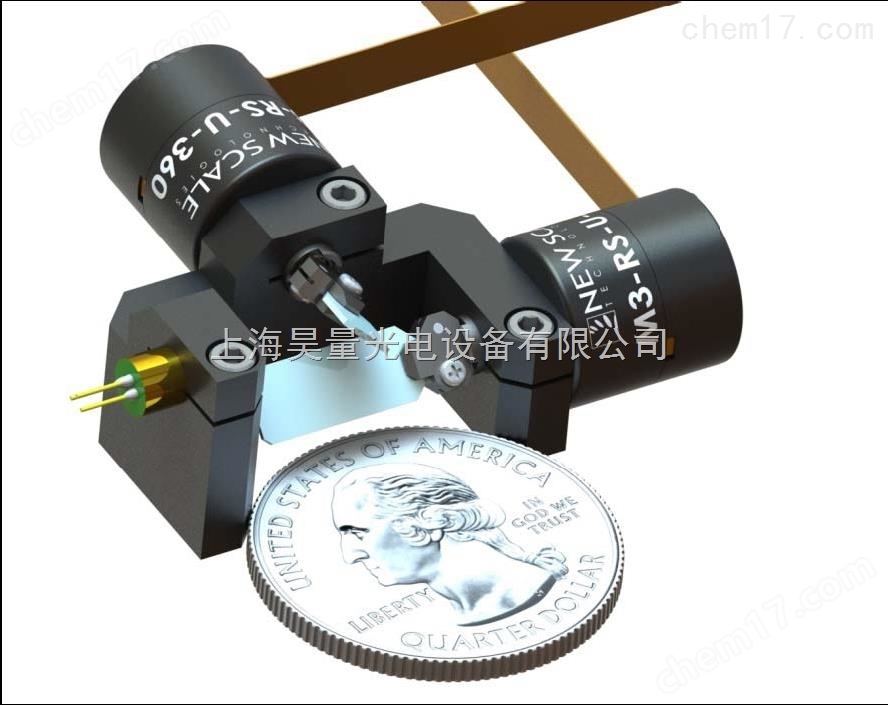
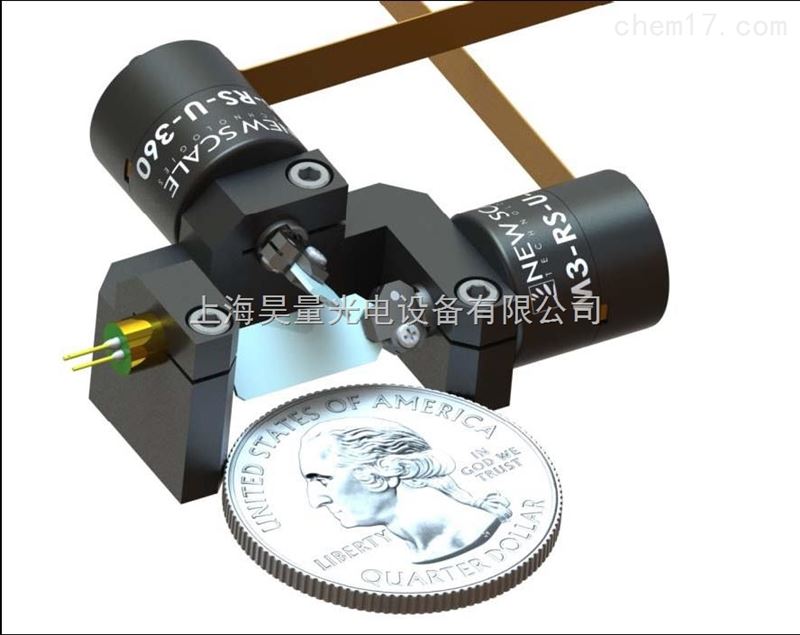
①光束控制和镜面定位系统,该系统是一个完整的光束控制系统。在紧凑的体积(直径12mm)中包含压电马达、位置传感器、轴承以及内置控制器。在微型振镜上安装了一个镀铝膜的镜子,每秒可旋转1100°,精度可达到0.025°。点对点光束控制和动态扫描频率可达100Hz。镜子的偏转角度可达到±20°采用*的自锁设计,只有在移动时才使用动力,使其拥有极低的功耗。输入电压只需要3.3V。
高精度微型振镜/压电扫描镜
单轴镜面定位开发套件(AU-DK-M3-RS-U-1M-20)

双轴光束控制系统(AU-DK-M3-RS-U-2M-20-L)

②旋转定位平台(AU-M3-RS-U-360)是集压电马达、位置传感器、轴承以及内置控制器于一体的运动系统。但是其拥有超小的体积,只有12(D)´12.5(H)。该系统可以提供连续的360°运动,并且拥有位置反馈系统,使其分辨率可达到0.025°。该微型振镜只需要输入3.3V的直流电压,运动时耗能仅为500mW,因此可以用电池或者USB作为电源,这非常利于手提和便携式设备。

u 主要特点
- 成本低
- 超小尺寸
- 低功耗
- 无外加控制器
- 高分辨率(0.0057°)
u 主要应用
皮肤科激光、荧光显微镜和成像仪器、体内和体外的微激光手术、3D打印、激光雷达、三维测量、遥感、防抖动设备、激光打标、激光雕刻、自由空间光通信、目标指示、目标探测、目标跟踪等。
u 主要参数
型号 参数 | AU-M3-RS-U-360 | AU-DK-M3-RS-U-1M-20 | AU-DK-M3-RS-U-2M-20-L |
Rotation Range | 360 deg continuous rotation | +/- 20 deg | +/- 20 deg |
Speed | > 1100 deg/sec | > 1100 deg/sec | > 1100 deg/sec |
Acceleration | > 1,000,000 deg/sec2 | > 1,000,000 deg/sec2 | > 1,000,000 deg/sec2 |
Stall Torque (min) | 0.04 N-mm | 0.04 N-mm | 0.04 N-mm |
Holding Torque (min) | 0.08 N-mm (zero power) | 0.08 N-mm (zero power) | 0.08 N-mm (zero power) |
Recommended Maximum Payload mounted to rotating shaft (Payload must be balanced) | |||
Mass | 3 g | 3 g | 3 g |
Inertia | 350 g-mm2 | 350 g-mm2 | 350 g-mm2 |
CLOSED-LOOP performance (with built-in position sensor) | |||
Recommended Step Frequency | Up to 100 Hz | Up to 100 Hz | Up to 100 Hz |
Resolution (encoder resolution) | 0.025 deg (440 µrad) absolute | 0.025 deg (440 µrad) absolute | 0.025 deg (440 µrad) absolute |
Repeatability | +/-0.05 deg (880 µrad) | +/-0.05 deg (880 µrad) | +/-0.05 deg (880 µrad) |
Accuracy | 0.25 deg (4400 µrad) | 0.25 deg (4400 µrad) | 0.25 deg (4400 µrad) |
Maximum Closed-Loop Step & Settle Times | 0.96 g-mm 2 inertial load* | 0.99 g-mm 2 inertial load* | 0.99 g-mm 2 inertial load* |
0.5 deg | 9ms | 9ms | 9ms |
5 deg | 14ms | 14ms | 14ms |
20 deg | 21ms | 21ms | 21ms |
OPEN-LOOP performance (external position sensor provided by user) | |||
Resolution | < 0.0057 deg (< 100 µrad) | <0.0057 deg (<100 µrad) | <0.0057 deg (<100 µrad) |
Accuracy | Typically better than 10% of distance travelled after calibration | ||
 上海市徐汇区虹梅路2007号6号楼270楼
上海市徐汇区虹梅路2007号6号楼270楼

